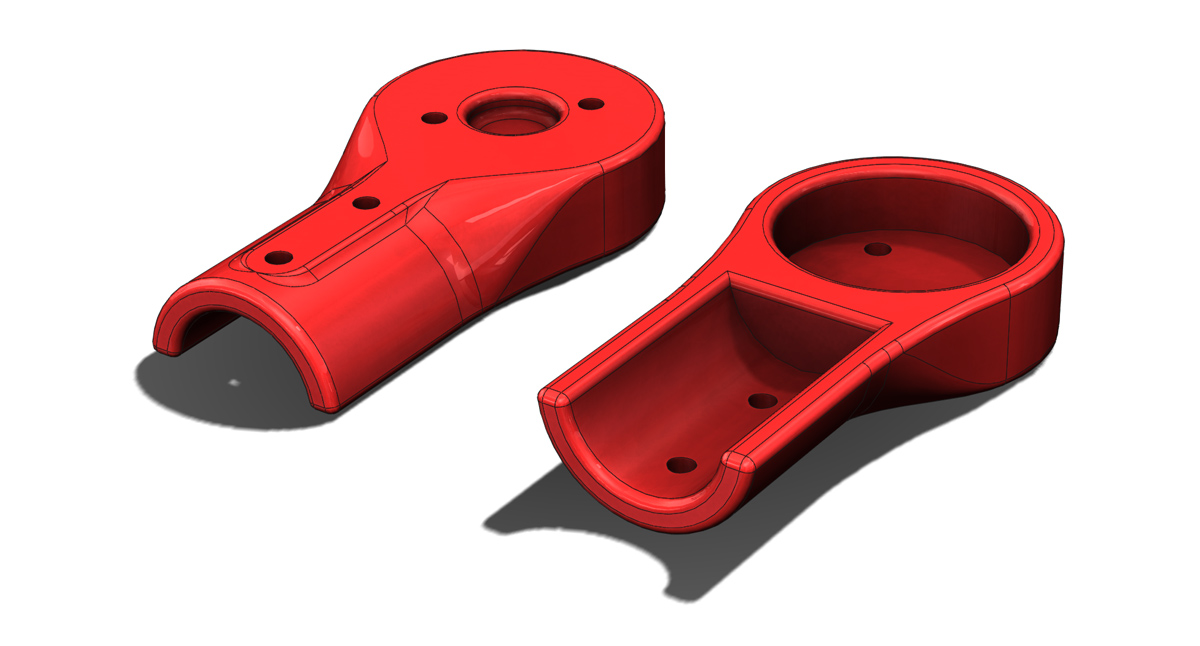
Over the last few days I have put several hours into development of the main chassis structures. Between the two main parts several needs have to be met including:
- Supporting the front arm bearings and the associated loading
- Mounting the flight controller
- Supporting the servos in an adjustable manner (for belt tension)
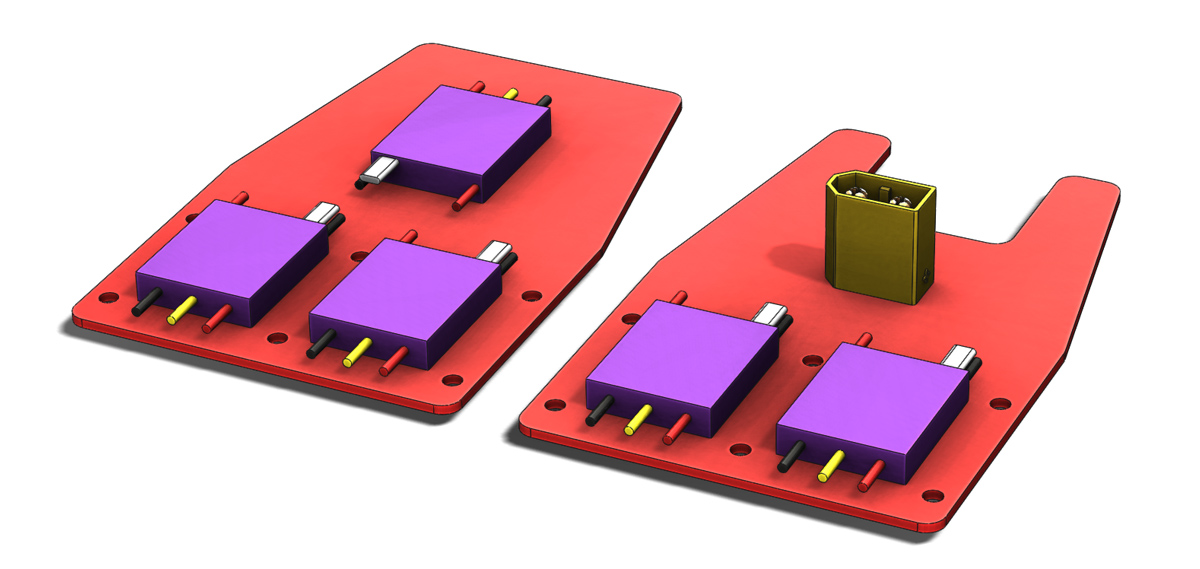
- Fitting between the power distribution plates and around all the moving components
- Attaching the rear boom
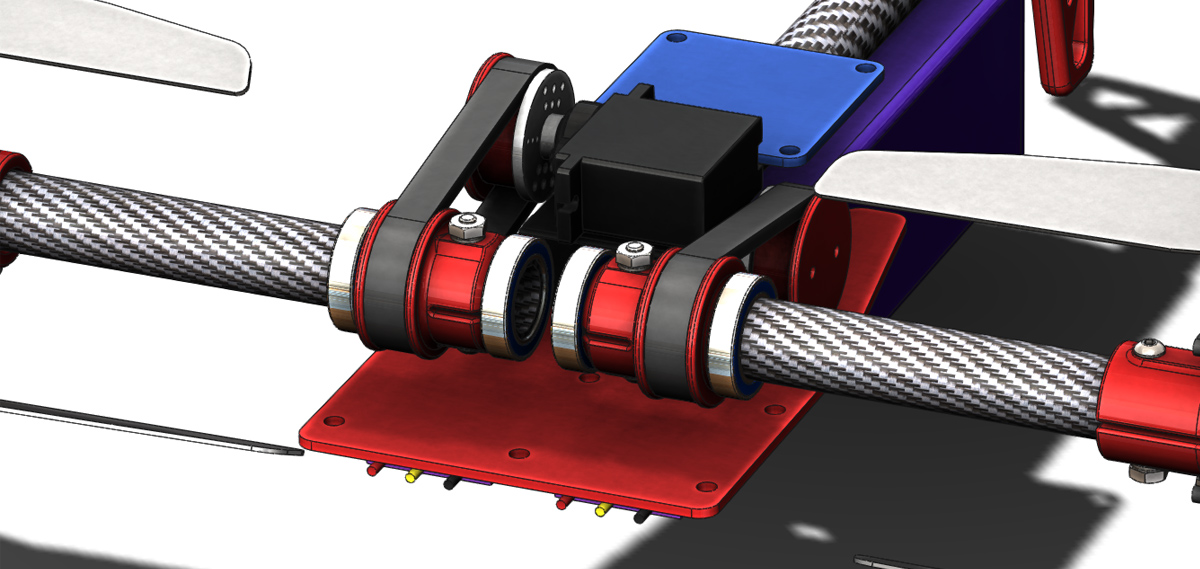
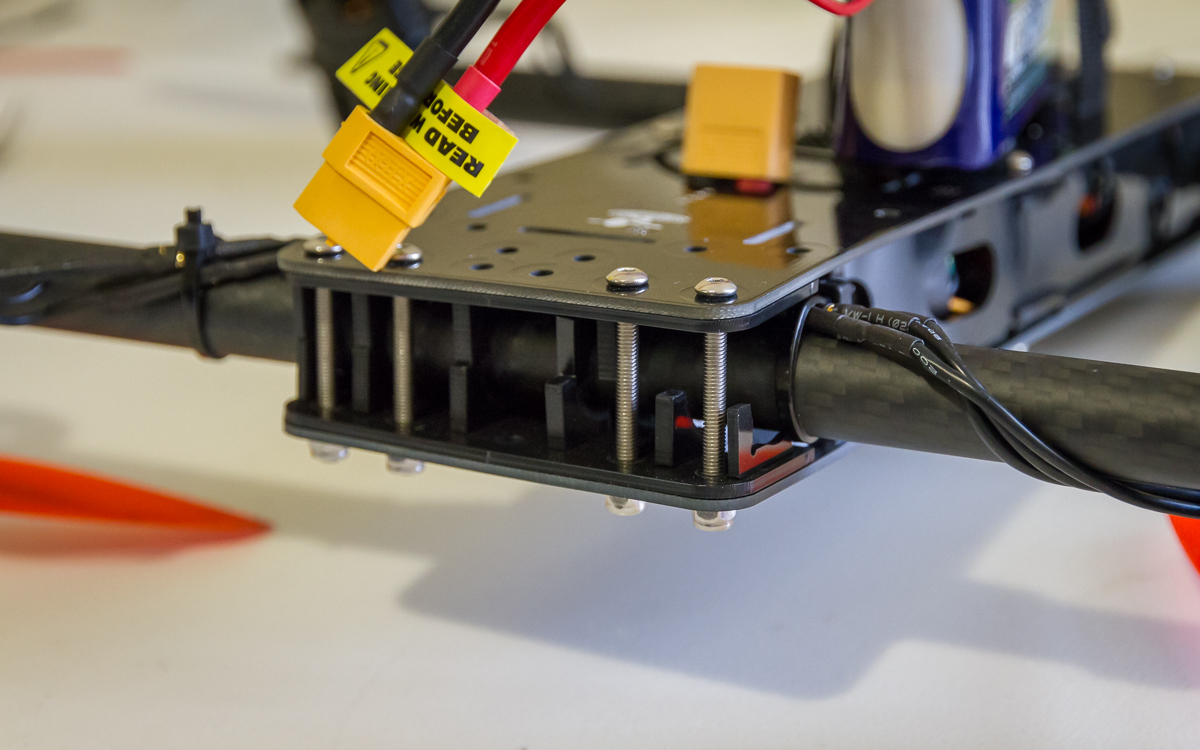
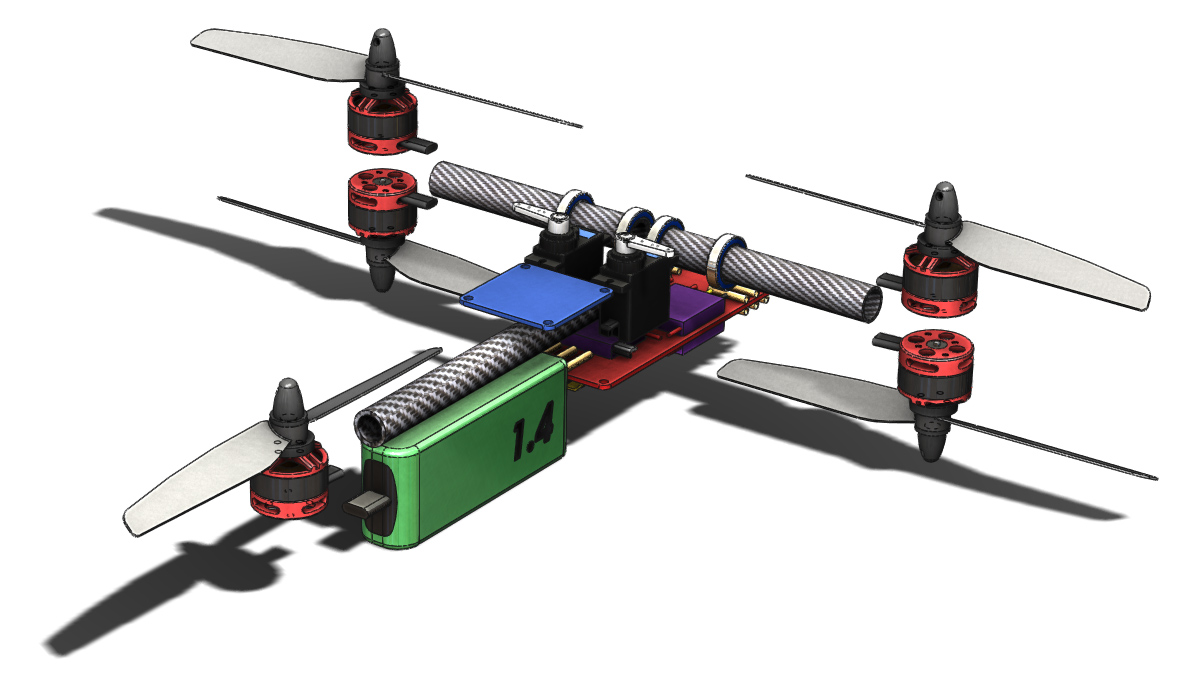
So far as seen in the image below the external shape is mostly in place. Internally the bearing support area is mostly sorted out but the servo mounting is not. As such I will hold on images of internal detail until that is in a ‘working’ state.
Also visible in the image is the rear boom clamping. A slotted hole penetrates the rear of the bottom chassis structure which is then clamped through the two holes in the side. Currently the supporting structure around this area is very deep so the clamping may not be particularly effective (i.e. structure may be to stiff), I will need to reassess.
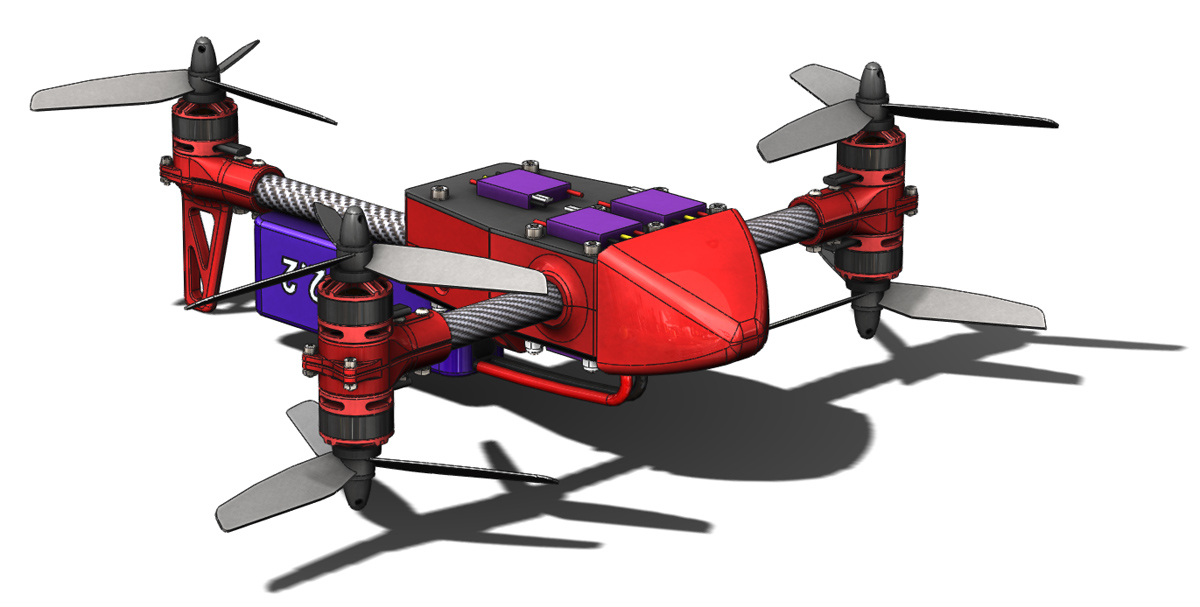
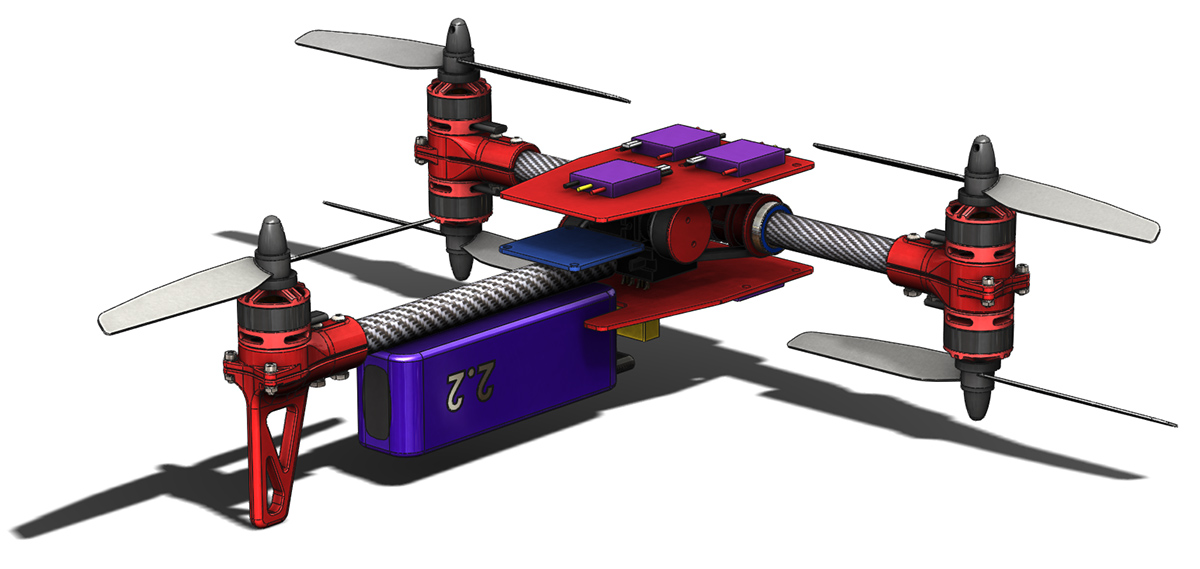
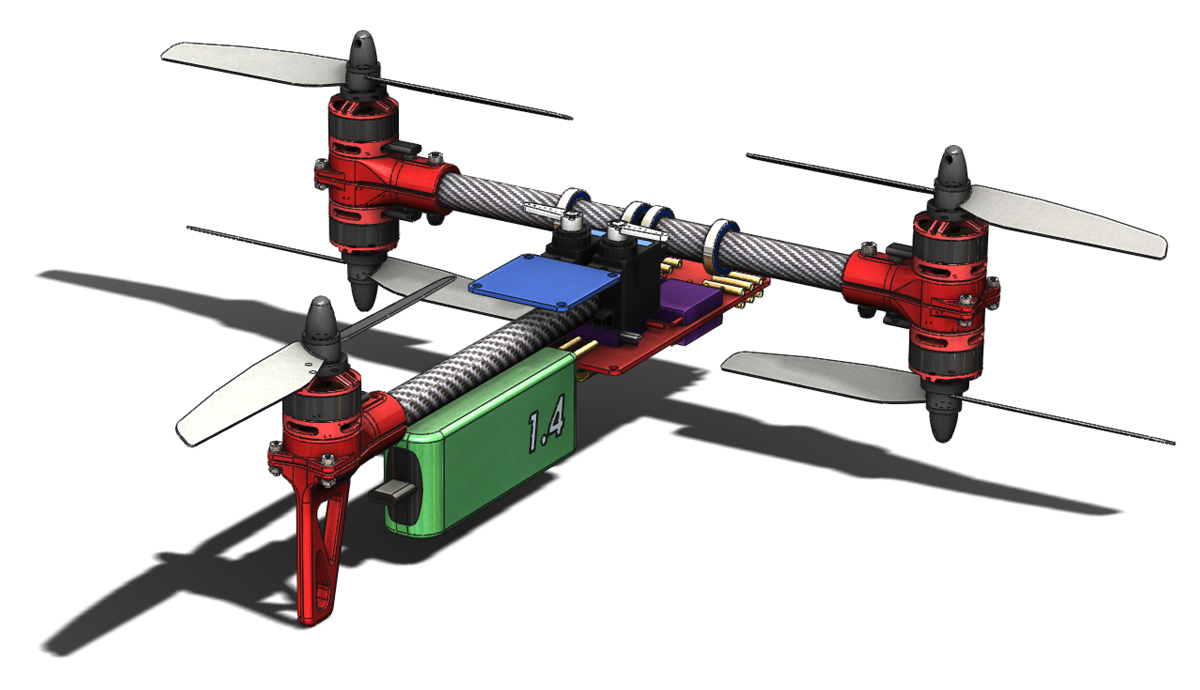
There is further external detail to work out around the flight controller mounting and battery. You may also note that I have changed the propellers. Crucially to a 5″ diameter but also shown here with 3 blades. The data I have seen suggests that a 5×4 propellor provides similar thrust to a 6×3 propellor (at the expense of some efficiency) and my experience with 5×4 props on the Spidex 220 has made me happy to consider this an alternative. I have not yet reduced the frame size so a 6″ propellor is still an option.
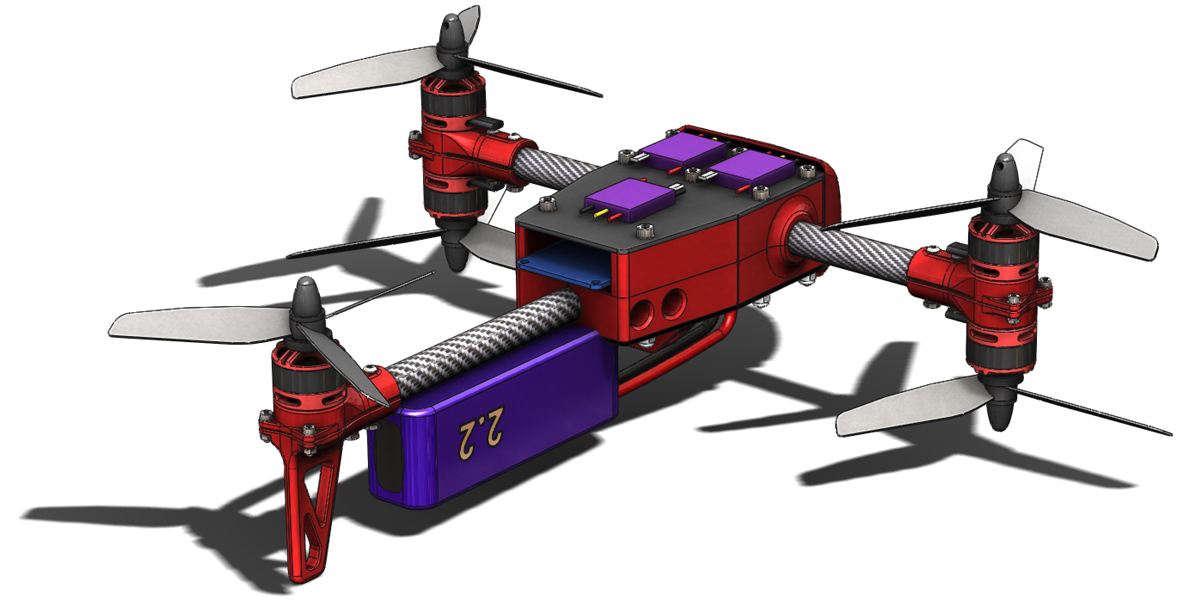
Also added is a front nose cone, primarily for aesthetic reasons at this point but it will surely improve the aerodynamics somewhat too. It is currently only a hollow place holder. The intention is to make it a snap fit on to the front of the chassis structures. That will be another learning experience and experiment in 3D printing to go along with everything else experimental on this airframe.
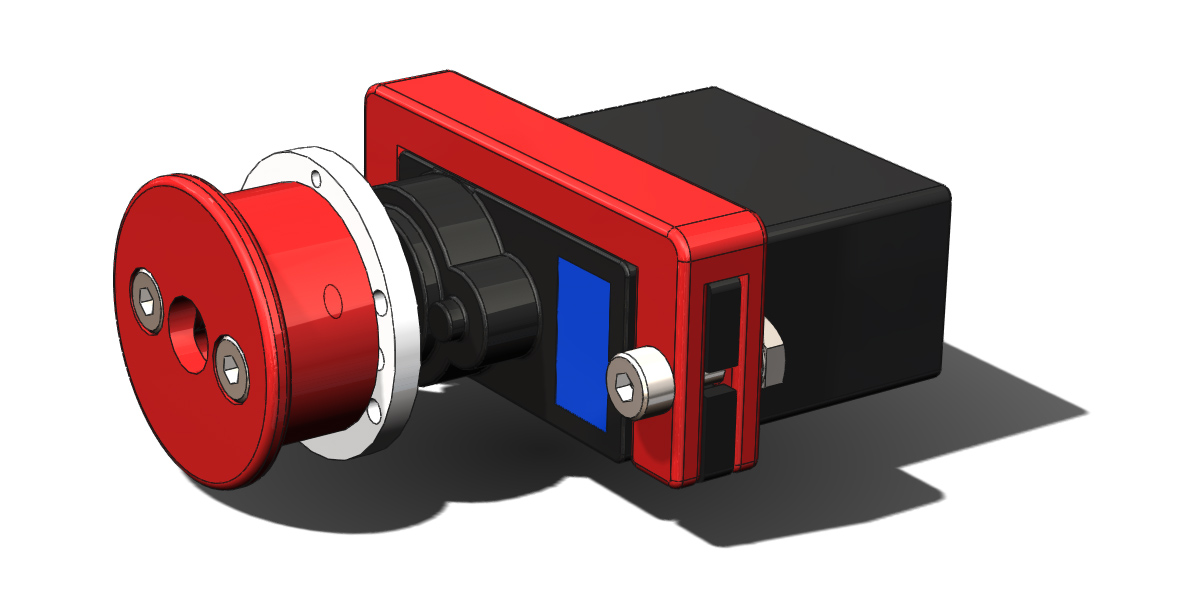
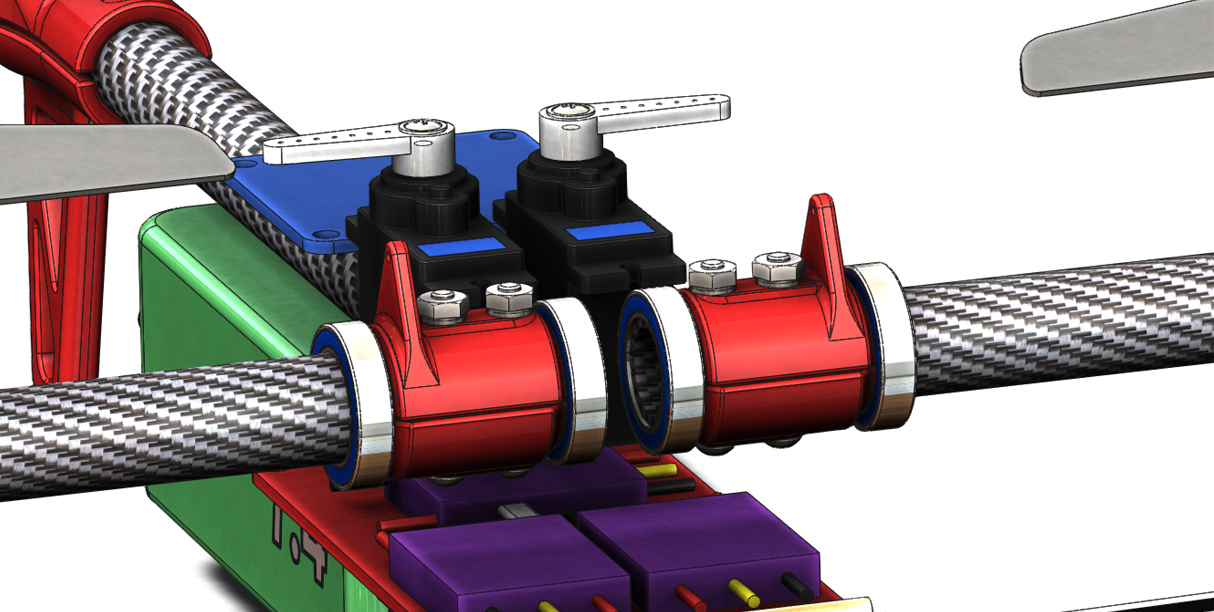
To facilitate the adjustment of the belt tension I have added a slider carriage of sorts to the servos which will fit into slots on the chassis structures. I’ve yet to add the tooth detail to the pulleys for 3D printing.
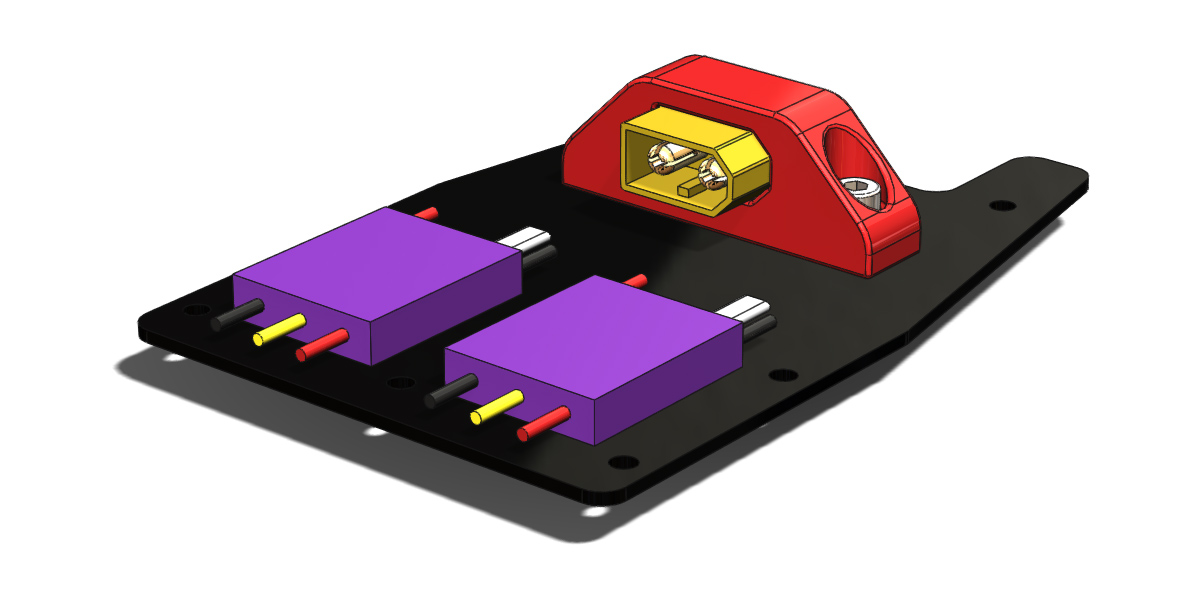
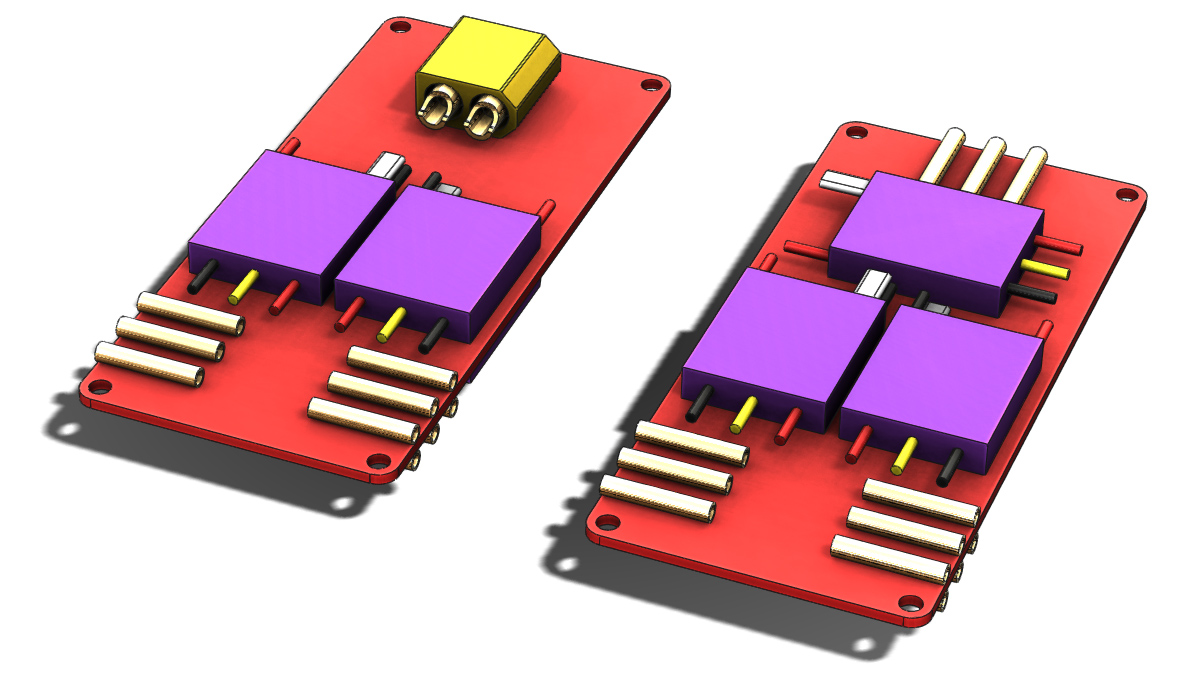
The final little detail to show off today is a holder for an XT60 socket. I decided that having the connector flat will mean less wire hanging low off the bottom of the craft.























{kind=link}