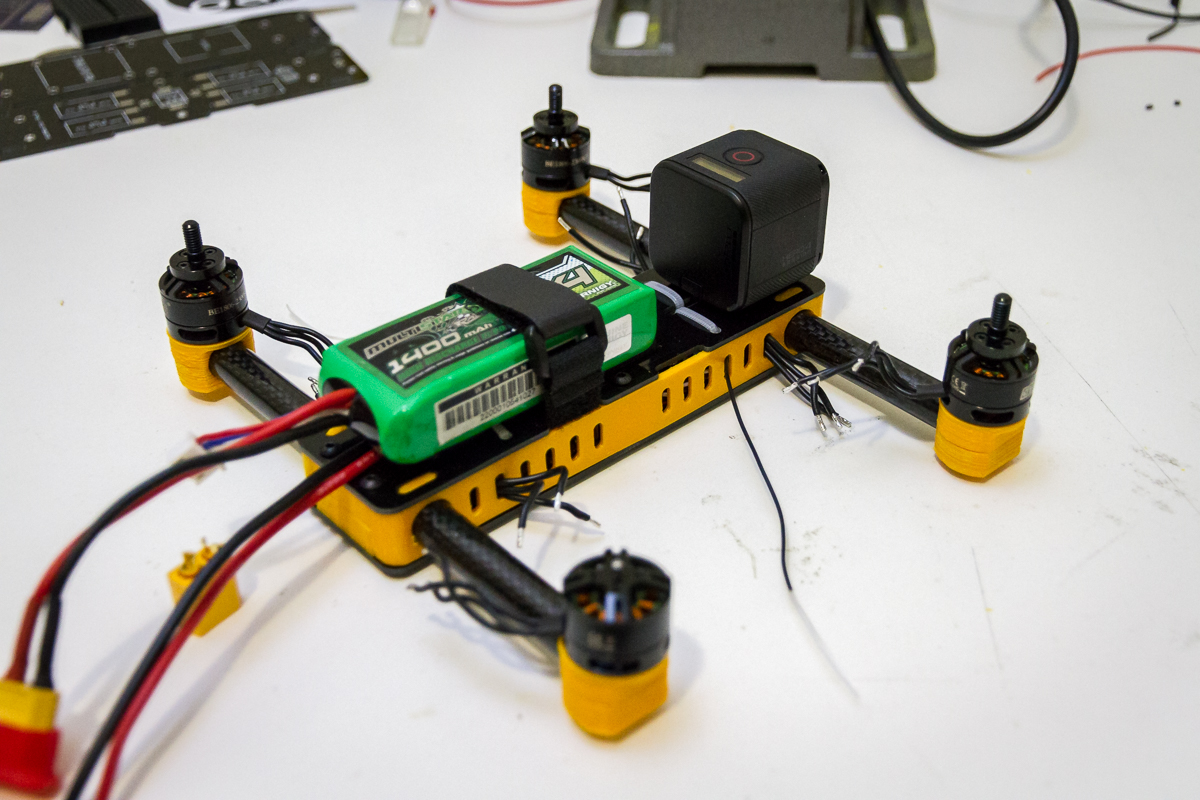
I have been a bit slow in getting this report together but I am pleased to say the as of late last sunday evening my second build of the 215 hopper design is airborne. For anyone keeping track that is just a 6 day turnaround from lost to flying again. There are a couple of things that worked in my favour to achieve this.
- Firstly the 3D printer from the workshop of SteelCity Electronics is currently on holiday to my workbench, as such I was able to start printing replacement parts immediately (more on this topic in the near future, I’ve got a big build cooking).
- The guys over at NextFPV actually had stock of every replacement part I needed. I expected I would need to order various bits from multiple sources internationally but discovering everything was stocked locally was a pleasant surprise. On top of that the service they offer is exceptionally fast. I am a very happy repeat customer of theirs. I the future I will gladly purchase through them whenever possible (hopefully there is an FPV setup in my future).
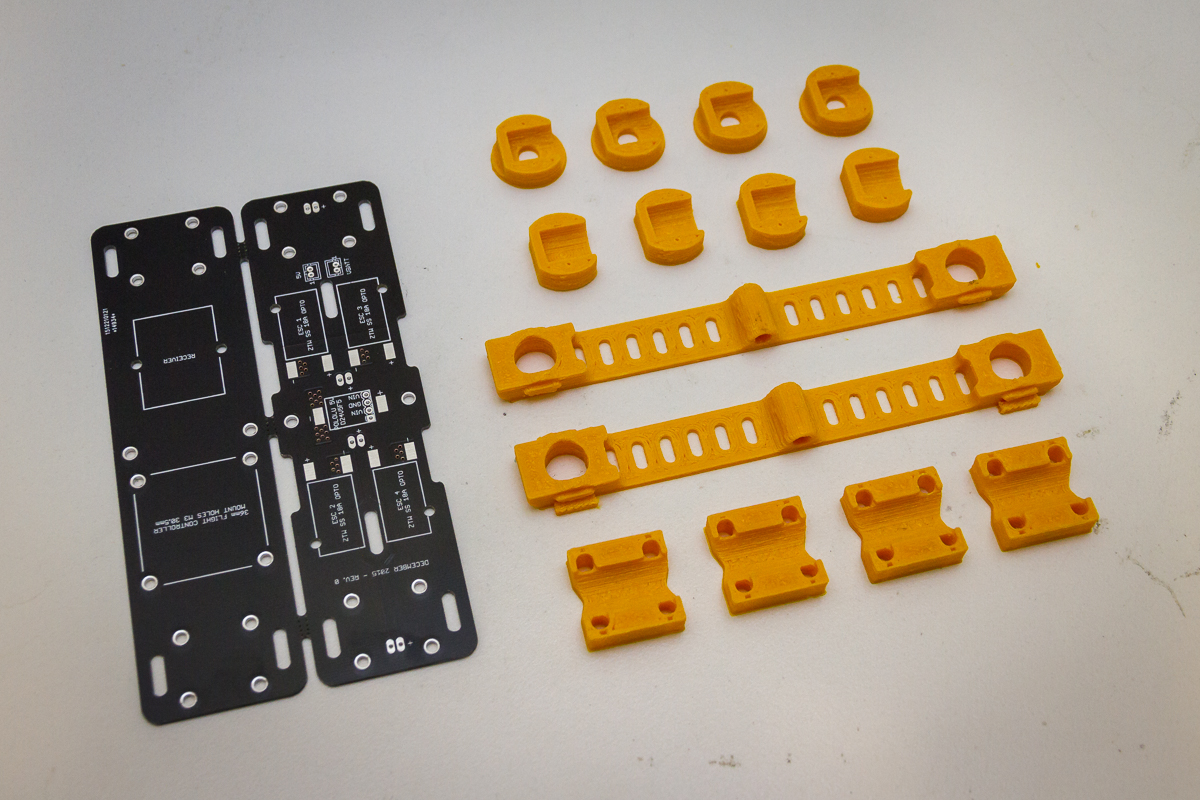
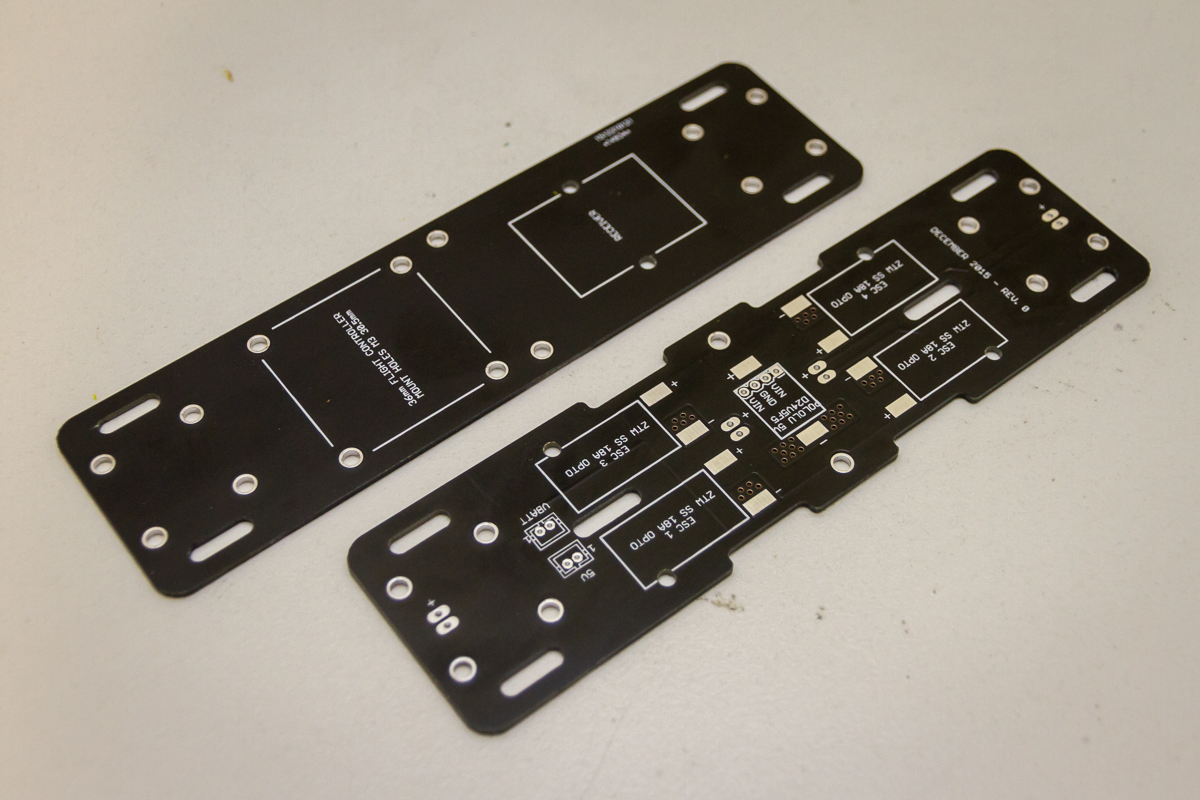
- When ordering parts for the first build I doubled (or more) quantities of the various bits of hardware so all of that was on hand. The PCBs were taken care of as DirtyPCB’s supply 10 per order by default.
With the rebuild I got the chance to address a few of the shortfalls of the first build. Changes included:
- Shortening ESC signal/ground wires so that there was less wire bulk in the body. it was a bit challenging squeezing everything in to the first build.
- Direct connection of motors to ESC’s. On the first build I needed to join the motor wires with the ESC wires as the motor wires were cut to short from the Spidex 220 build. In reality this is still not a very practical solution as the wires first need to be passed through the side plates. However for the sake of minimalism I stuck with it.
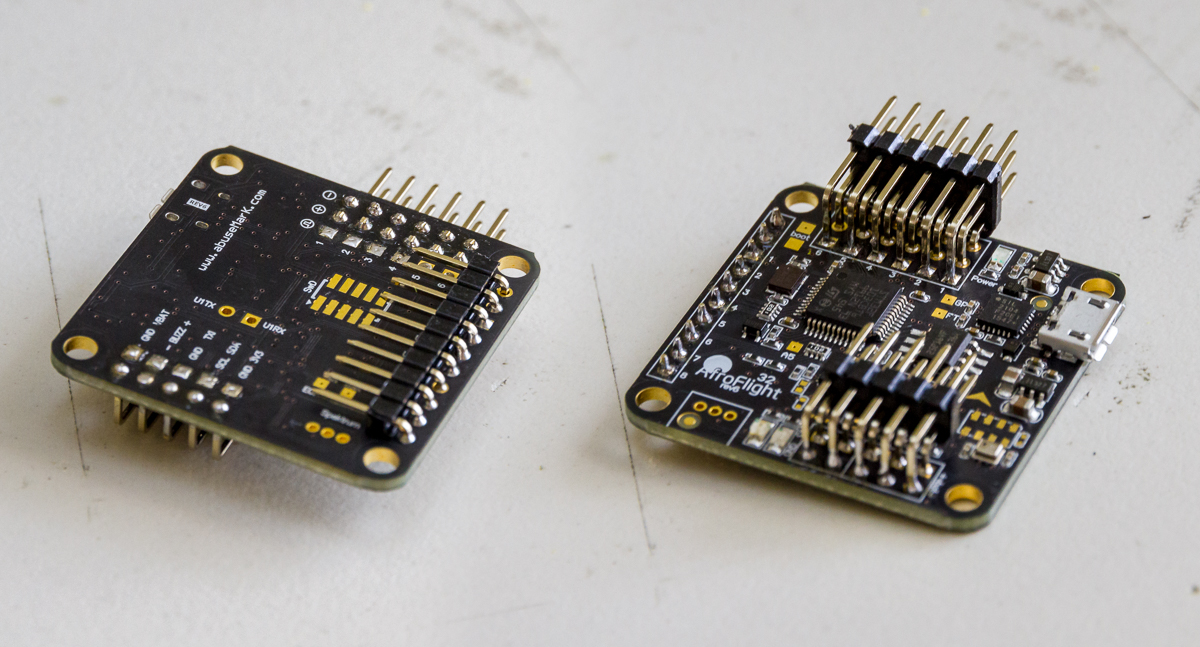
- Externally accessible USB. This is the most valuable change from the first build and is thanks mostly to the change in location of the port on the Naze32 Rev. 6 board. I also printed a unique side plate with an opening to suit.

- The upgrade to the Nae32 Rev. 6 also allowed for very tidy connections all around (no more soldering wires directly to the board). Seen in the photo below is the way I have installed the pin headers on the Naze32. 90° headers are used on all connections. The ESC outputs are installed in a fairly typical configuration. The RC input connections are under and towards the centre of the board and the extra features (Vbatt, buzz etc.) are directed back across the board.

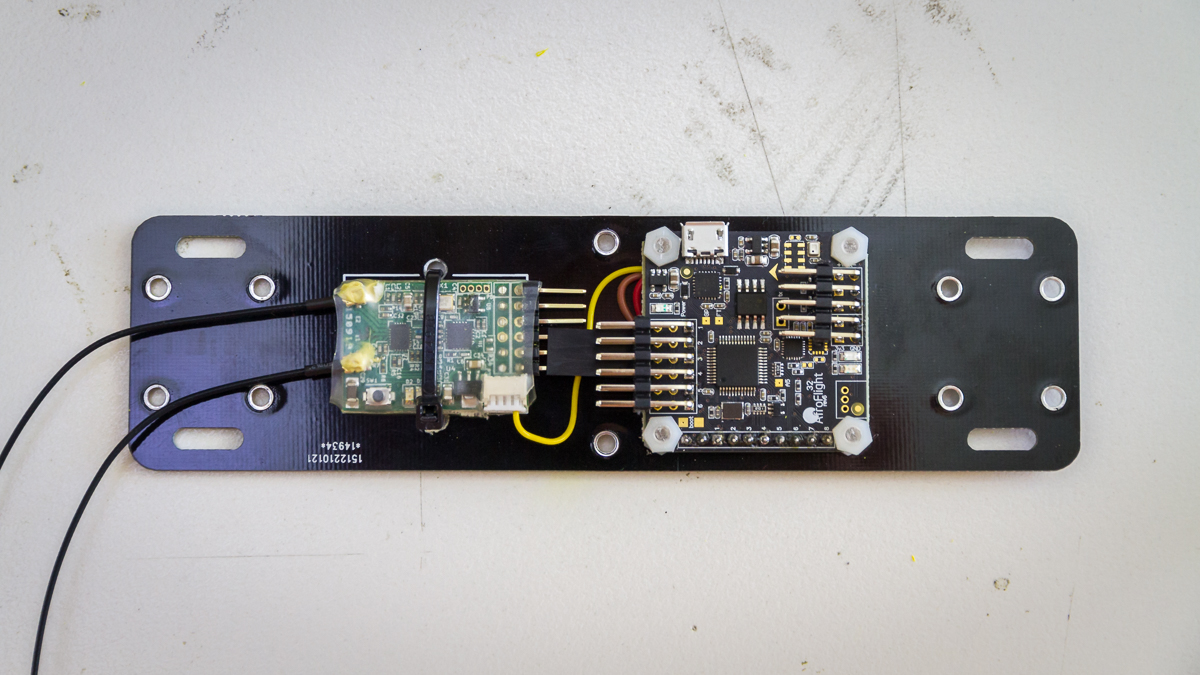
- SmartPort telemetry. Rather than trying to fit a buzzer inside (which becomes surprisingly large in such a small space) I connected the SmartPort on the X4R-SB to a soft serial port on the Naze32. A buzzer will fit inside but for now I am relying on the telemetry to know the status of my battery. The photo below shows how tidy this setup is. Also note that for clearance to the ESC connections on the Naze32 I have to trim the top row of headers from the X4R-SB.


The only quirk with this build, and I find it strange given that it is newer hardware, is that LuxFloat can’t run reliably ( I had no problems with it on Rev. 5 hardware). It may in fact be the extra processing load from the soft serial so I will have to check into that further.
Next on my agenda for this copter is to get the GoPro mount(s) sorted. Then put together a more thorough look at the design and build process with a full bill of materials and files if you would like to build you own.
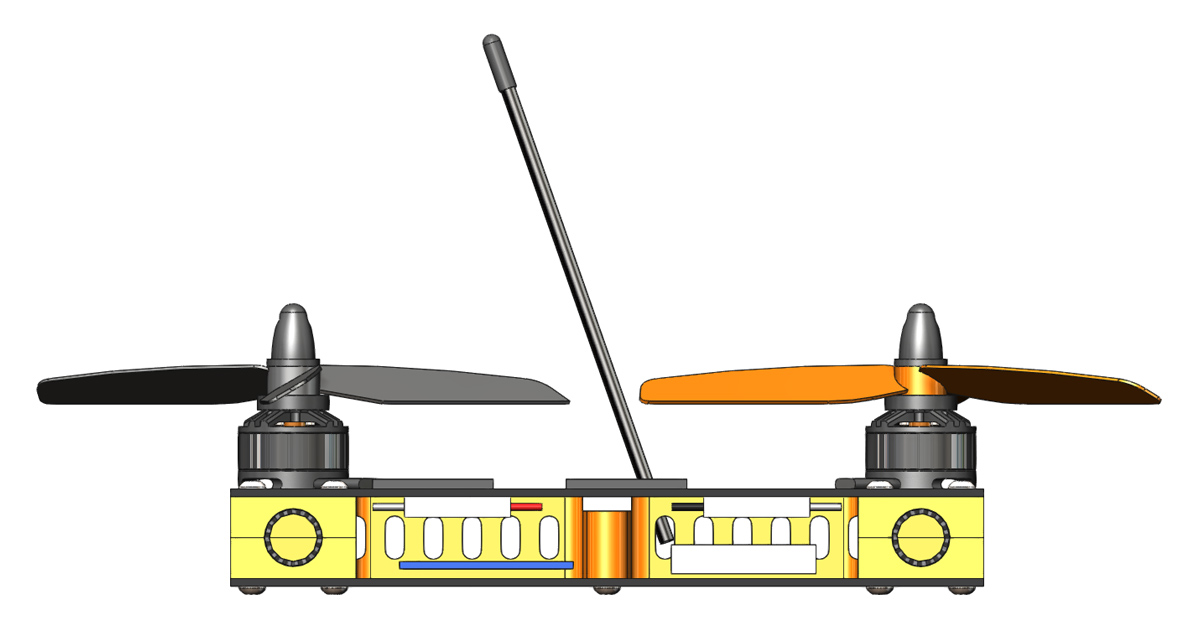
Given that the design of the 215 Hopper was inspired by the FliteTest VersaCopter I thought a family photo was a fitting way to end this post.